AI、IoTはビジネスをどう変えるのか
2016/2/8
毎日のようにニュースに登場する「AI」「IoT」というキーワード。しかし、AI、IoTにより、ビジネスがどう変化するかについて、具体的なイメージを描くのは難しい。AI、IoTがビジネスにもたらす変化の本質とは何か、どのようなビジネスチャンスが生まれるのか、そして、日本企業はAI、IoTをどう生かすべきなのか。東大松尾豊准教授も参画するIGPIビジネスアナリティクス&インテリジェンスの代表兼経営共創基盤パートナーの塩野誠氏が、AI、IoTの本質を解き明かす。(全7回)
産業用ロボット王国「日本」
近年、メカトロニクスとしてのロボット技術と人工知能が融合することによって、より高度なロボットが開発されるのではないか、という漠然とした主張が散見される。
ロボットを「人間の代替として自律的に動作を行う機械」と定義すると、その頭脳となり得る人工知能の発展はロボットにとって大きなターニングポイントとなるだろう。「人工知能が物理的な出力を持った状態」が将来的にはロボットだとも考えられる。
日本政府も成長領域にロボット、人工知能を据えており、これらがまとめて語られることも多い。一方で、現状では完全な自律性を持ったロボットは少なく、人間が操作するものをロボットと呼んでいる場合も多い。
一般的には、ソフトバンクの販売している「Pepper(ペッパー)」などが今後、家庭に入ってくるロボットのイメージだろうか。
ソフトバンクは2015年2月にIBMと提携し、IBMの「ワトソン」と呼ばれる人工知能(同社は人工知能とは呼ばずにCognitive Computing Systemsと呼んでいる)を利用して、銀行での営業支援や製薬会社の新薬開発など幅広い分野で事業展開し、5年後には1000億円規模の売り上げを目指すとしている(2015年2月10日付日本経済新聞)。
日本は産業用ロボットで世界のシェアの過半を持ち、安川電機、川崎重工、ファナックといった日本メーカーの産業用ロボットは世界中で使われている。
日本はロボット先進国としての道を歩んでいるのだろうか。
2011年3月に起きた東日本大震災では、地震と津波によって東京電力福島第一原子力発電所が被災した。被災後の原子力発電所は生身の人間が近寄ることを阻む高い放射線量と大量の瓦礫(がれき)に覆われた。
その状況の中で日本の国民は漠然とロボットの投入による事態の収拾を期待していたようだが、人々の想像するホンダのASIMOやソニーのAIBOのような人型、犬型のロボットが瓦礫の上を動き回ることはなかった。
有事を想定しにくい日本のロボット
最初に、原子力発電所に入っていったロボットは、米iRobot製の「PackBot」だった。
このロボットは人型でも犬型でもなく、戦車や重機のようなカタピラ(無限軌道)がついた走行部分の上に作業用のアームが搭載されており、人間が遠隔操作し、アームによって物体をつかんだりすることができる。
iRobotはMITの人工知能研究室出身者が1990年に創業し、戦場や紛争地域の偵察、救助、地雷探知といった用途に用いるロボットを開発してきた。
PackBotにはいくつかの種類がある。アームがなくカメラを搭載した仕様の軍用偵察ロボットは戦場で兵士がロボットを投げることや高所から落下することも想定し、極めて頑丈につくられている。この例に限らず、米国の軍用ロボットは、危険地帯での実戦配備用に設計されている。
iRobot製のPackBotに遅れて、日本のロボットであるQuinceが福島の原子力発電所に投入された。Quinceは千葉工業大学未来ロボット技術研究センターの小柳栄次氏によって開発されたロボットである。震災後の初期的な段階では日本のロボットとして派遣されたものはQuinceだけであった。
東日本大震災で日本のロボットについてわかったのは、「わが国では原子力発電所の事故のような有事を想定したロボットの開発と実用化が進んでいなかった」という事実だった。
その背景には日本の国土が戦地になることや原子力事故を想定したロボット開発について、政府からも民間からも予算が付かないという事情がある。
政府からすれば有事の発生確率の低さや日本の技術に対する高い信頼性もあいまって事故を前提とした危機状況の中で活躍するロボット開発を経済的に助成することは難しい。また、民間企業ではニーズのない製品に開発コストをかけにくい。
例外的には、ロボットではないものの平和利用という内容で政府も支援したコマツの対人地雷除去機がある。しかし、米国のように軍事技術の発展を目的とするDARPA(米国国防高等研究計画局)に支援された軍用ロボット開発のような素地もないなかで有事用のロボット開発は困難だと言える。
医療ロボットは米国が先行
有事用ロボットではないが、人間の生死に関わる医療分野でも日本は米国の後塵(こうじん)を拝している。
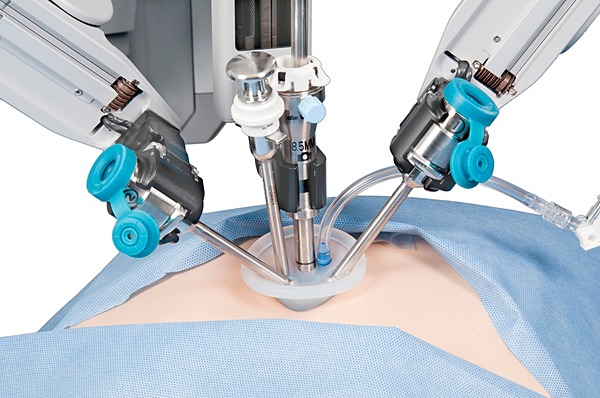
たとえば医療用手術分野で最も有名なロボットはダ・ヴィンチだろう。ダ・ヴィンチは内視鏡手術支援を行うアーム型ロボットであり、腹腔(ふくくう)鏡下手術に利用される。

1999年にヨーロッパで医療機器として認可を受け、その後、日本では2009年より医療機器としての認可を受けた。ダ・ヴィンチは非自律型ロボットであり、自動で手術をするわけではないマニピュレーター型ロボットである。
ダ・ヴィンチを使用することによって医師は患部の拡大された3D画像を見ながらレバーを動かし、そのレバーの動きが縮小されて患部に接触するアームに反映される。
実際に自分で腹腔鏡下手術のシミュレーションを行うとわかるが、人間の手の動きでは限界があるところをロボットアームであれば鉗子(かんし)の可動領域を広く確保し動かすことができる。そのうえ、人間の手振れを自動的に補正する機能がついている。
ダ・ヴィンチは米国Intuitive Surgicalの製品であるが、ダ・ヴィンチの初期の開発関係者によれば、宇宙空間で活動するスペースシャトルに搭載されているロボットアームに着想を得たということである。
2012年より日本でダ・ヴィンチを使った前立腺がんの手術が保険医療として認められたことが普及を促進した。ダ・ヴィンチの導入には2億~3億円かかるが、すでに日本で200台程度が導入されている。
こうしたインセンティブが医療分野でのロボットの発展に大きな影響を与えることは間違いないだろう。医療用ロボットでは米国に遅れながらも2014年に東京工業大学と東京医科歯科大学の大学発ベンチャーであるリバーフィールドが、空気圧で駆動する内視鏡操作ロボットであるエマロを発表した。エマロの価格は1500万円となっている。
日本発の画期的なロボット
もちろん日本にも独自の設計思想を持った画期的なロボットがいくつか生まれている。
たとえばユカイ工学の開発した「BOCCO」というロボットはスマートフォンと連携し家庭内の様子をセンシングして通知したり、ロボットを介して家庭にいる人にメッセージを届けたりすることが可能である。BOCCOはそのかわいらしい外見も含めて人間同士のコミュニケーションのインターフェースだと言える。
こうしたインターフェース型のものには、オリィ研究所のOriHimeがある。ロボットに人工知能が搭載されているわけではなく、人間の分身として、たとえば病床で身体を動かせない人がOriHimeを介して遠隔地にいる人とコミュニケーションする用途に使用されている。
こうした人間の感覚や動作の拡張や強化のツールとしてはCYBERDYNEの開発したロボットスーツ「HAL」がある。HALは脚に障害を持ったり、脚力が弱くなったりした人向けの治療機器である。CYBERDYNEは2014年3月に東証マザーズに上場している。
日本は世界に冠たる産業用ロボット大国であり、産業に利用される「平時」のロボット技術は安泰だと捉えられるかもしれない。しかし「有事」に関しては、米国に遠くおよばないというのが現実である。
連載の第2回では、人工知能が搭載されたアルゴリズムが物理的なメカトロニクスとしてのロボットにどのように活用されるのかを考えていきたい。
