2021/3/31
【5G協創基盤】テックの未来と現在はどこで交わるのか

NTTドコモ | NewsPicks Brand Design
NewsPicks Brand Design / Chief Editor
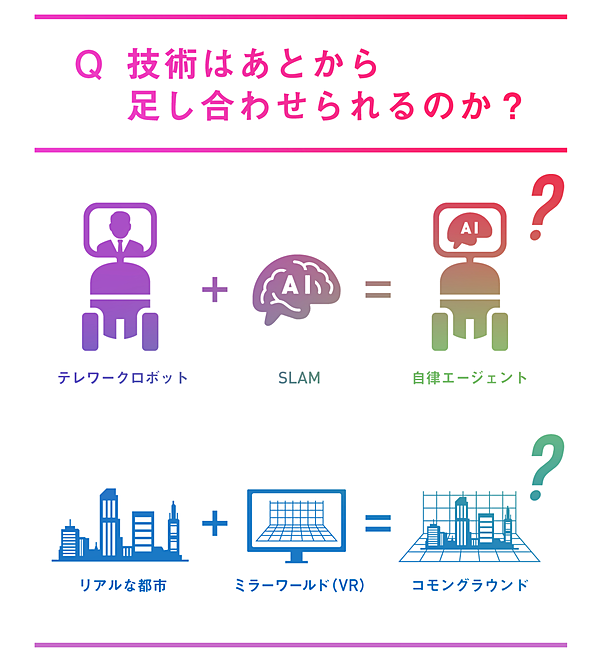
docomo 5G DX AWARDS® 2020で準優秀賞を受賞した2社のうち、スマートロボティクスは「テレワークロボット™」というロボットの「身体(ハードウェア)」を、Kudanは「SLAM(環境地図作成と自己位置推定)」という技術で、ロボットの「知覚(ソフトウェア)」を手がけている。
これらを足し合わせれば、 機械の身体と心がくっついて、勝手に動き回る自律型デジタルエージェントが生まれるんじゃないか。
聞き手に迎えたのは、ヒトとデジタルが共生するための都市空間をあの手この手でつくり出そうとしている特殊建築家の豊田啓介氏。三者の知見を持ち寄れば、なにか面白いイノベーションが起こりそうな予感がする。
これらを足し合わせれば、 機械の身体と心がくっついて、勝手に動き回る自律型デジタルエージェントが生まれるんじゃないか。
聞き手に迎えたのは、ヒトとデジタルが共生するための都市空間をあの手この手でつくり出そうとしている特殊建築家の豊田啓介氏。三者の知見を持ち寄れば、なにか面白いイノベーションが起こりそうな予感がする。
INDEX
- 通信環境は整った。ロボットがいる未来は?
- 5Gが可能にした「自走する」ロボット社会
- 「先端」と「裾野」のギャップを埋める
- 「未来」と「現在」はどこでつながるのか
通信環境は整った。ロボットがいる未来は?
── スマートロボティクスとKudan、「docomo 5G DX AWARDS 2020」を受賞した2社はそれぞれ、ロボットの「身体」と「知覚」を扱っている……ということでよろしいですか?
スマロボ・井島 そうですね。2016年の創業時、スマートロボティクスは音声を使ったコミュニケーションロボットを開発していました。自社で民泊や店頭案内向けのコンシェルジュロボットの実証検証機開発までこぎつけたのですが、音声認識技術がネックになったんです。
サードパーティのクラウドサービスを使えばやりたいことは実現できたんですが、そうなると従量課金でコストが増えていく。ハードやソフトができても、ビジネスラインに乗せるにはランニングコストがかかりすぎました。
そこで、事業をピボットして移動型ロボットに取り組むようにしました。

大手商社子会社の情報システム部門の立ち上げやFA系の制御システムのGUI開発、iモードコンテンツの企画・開発、モバイルコンテンツのコンサルティングなどを経て、2016年3月のスマートロボティクス設立時より取締役に就任。
── 一方のKudanは、ロボットの自己位置推定。これは、ヒトでいう「眼」や「脳」に当たる技術ですよね。
Kudan・中村 そうですね。Kudanは「超」が付くほどのディープテックカンパニーでして、AP(Artificial Perception=人工知覚)という領域の「SLAM(Simultaneous Localization And Mapping=環境地図作成と自己位置推定)」という技術に取り組んでいます。

2001年大手広告代理店入社。大手自動車メーカー、大手通信キャリアを担当するアカウントプロデュース職を経て、2020年Kudan株式会社へ入社。ナショナルクライアントとの大規模プロジェクト型業務で培ったスキルで、Kudanのビジネス開発を牽引。
ロボットが、自分がいる環境空間を地図化する作業と、その環境地図の中で自分がどの位置にいるのかを推定する作業を同時に行うのが、SLAMという技術。そうしたSLAM技術を独自に磨き込んだソフトウェアを開発しています。
── ロボットに「ここはどこ?」をわからせる技術?
中村 そんなイメージです。うちの2歳の息子は、すでに自分の環境地図と空間認識を持っています。知っている道を通ったら、この先にすべり台のある公園があるとわかって「シューシュー(すべり台の意)」と言う。2歳の子どもにもあるこの空間認識機能をロボットに持たせるのは、かなり難しいんです。
たとえば、クシャクシャっと丸めた紙を部屋の隅にあるゴミ箱に放る。このとき、人間は絶妙な力加減を行っていますよね。
これができるのは、ゴミ箱までの間にどれくらいの距離があって、その間にどんな障害物があるかを認識しているからです。その高度な認識にもとづいて、このくらいの角度と強さで投げれば、天井にもぶつからずに入るだろうと、無意識のうちに行動の調整を行っているわけです。
── その演算をするのが、Kudanのソフトウェア。そして、豊田啓介さんは建築家として、ロボットが認識しやすい実空間を作ろうとしています。この3つを足し合わせれば、どうなりますか?
noiz・豊田 またすごいボールが飛んできましたね(笑)。
今の話を聞くと、お二人は移動する物理的な機械の視点で技術開発を行っている。僕は建築都市を作る側なので、そういった機械が動くための環境を、どう汎用化できるか、と考えます。

米・SHoP Architectsに所属したのち、2007年より建築デザイン事務所「noiz」を共同主宰。2017年に建築・都市のコンサルティングプラットフォーム「gluon」を設立。2025年大阪・関西国際博覧会 誘致会場計画アドバイザー(2017~2018年)。2021年4月にグランドオープン予定の「コモングラウンド・リビングラボ」ディレクター。
中村さん(Kudan)のようにSLAM化による自律移動エージェントをめざすにあたっては、まださまざまなベンチャーがいろんなアプローチで開発に挑戦しており、それぞれ生き残るのに精一杯です。A社、B社、C社と異なる規格があるときに、どうすれば共通言語を抽出し、標準化できるのか。
また、僕らがデザインする環境には、いろいろなロボットが入ってきます。それも井島さんが作っているような物理ロボットだけでなく、ARやVRのアバターも同じ会議室の席に行かなきゃいけなくなる。
要するに、違う言語を話す人同士が、どうやって同じ場所で楽しく過ごせるか。それを、デジタルエージェントを含めた、より広いダイバーシティで考えないといけなくなっているんです。
── 身体のつくりから認識の方法まで、根本的に違うロボットとのユニバーサル・デザインを考えないといけないということですね。
豊田 そうです。これって言うだけなら簡単ですが、実現するのはとても難しい。
僕は十社が十様のプロダクトやサービスを開発してAPIを連携させるより、建物や空間側に情報処理力やデータを持たせてコモングラウンド化(公共空間化)したほうが、開発側のコストも社会的コストも圧倒的に下がると思っています。
ただ、これをベンチャーの開発者がやろうとしても、手のつけどころがないんですよね。せいぜい、先行してSDK(Service Development Kit)を公開し、誰かが乗ってくるのを待つとか、乱立による混乱を避けるとか。
これではらちが明かないから、10年先、20年先のあるべき姿から導き出すようなやり方で、社会投資や中長期的な開発ができないかと考えているところです。
5Gが可能にした「自走する」ロボット社会
── それぞれのベンチャーが個別に開発するのは非効率だから、社会基盤としての共通基盤を先に作る。その投資をしよう、と。
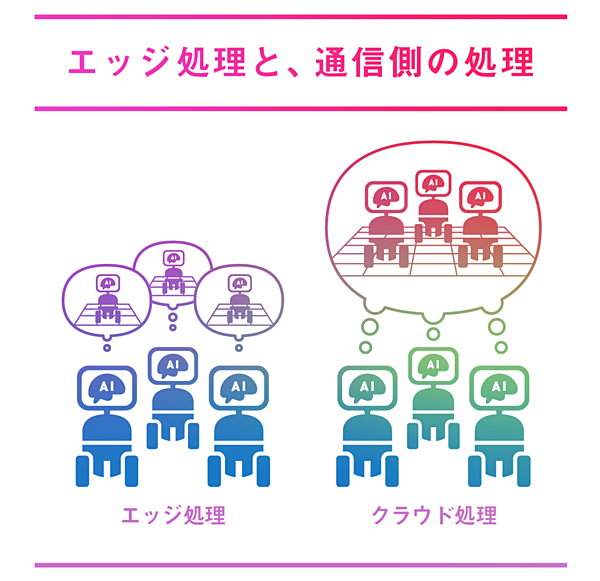
豊田 加えて、個別の計算処理の負荷を、ロボット側ではなく通信側に委譲しましょうという技術的な話ですね。
このまま行くと、それぞれのエッジデバイスにコンピューターや各種センサーを大量に積んで、ものすごく負荷の大きい情報処理をさせることになる。計算が膨大なので、バッテリーやボードも高価になります。
でも、空間情報や物理情報を標準化できれば、ロボットはあらかじめ整理されたデータをスキャンするだけで自律的に動けるし、それをクラウドで管理できれば群制御や全体最適も行いやすくなります。
── いいことずくめじゃないですか。
豊田 そうなんですよ。ただし、その実現には大容量通信の安定性と低遅延が確実にならないといけなかった。コンマ何秒の通信遅延で安全を担保できなくなったり、VRやARの没入感が損なわれたりするからです。それをようやく実現したのが、「5G」ですよね。
中村 いま豊田さんがおっしゃったことには激しく同意しますし、まさにそれこそ、私たちがドコモ5G オープンパートナープログラム®に参加した理由です。
ドコモはdOIC(ドコモオープンイノベーションクラウド®)という独自のビジネスクラウドを持っているだけでなく、ビジネスマッチングプラットフォームとしてのドコモ5Gオープンパートナープログラムや、今回のdocomo 5G DX AWARDSといったイノベーションの取り組みを企画・運営しています。
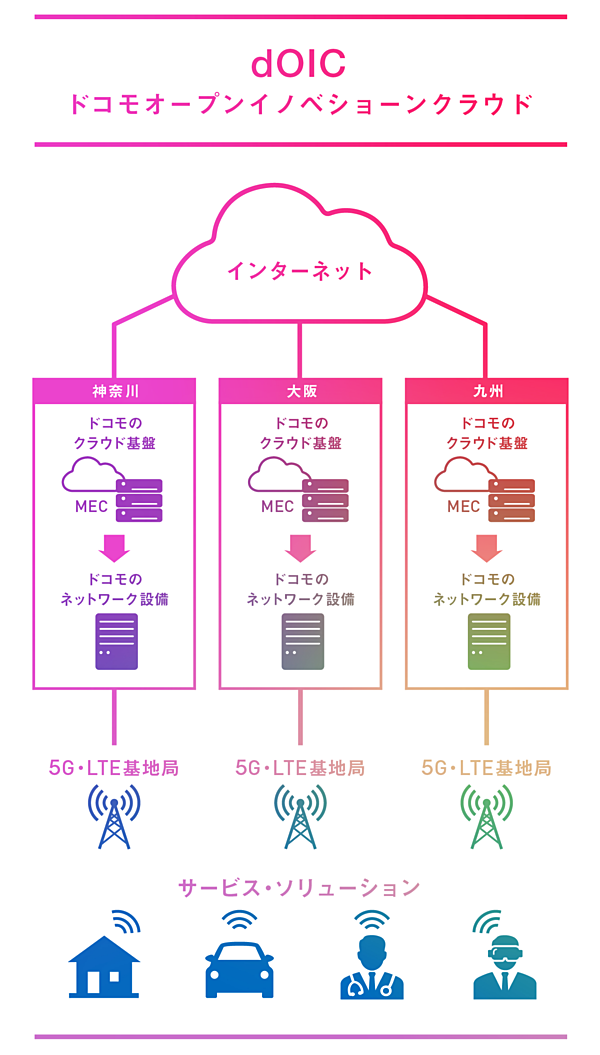
dOICは5G時代の低遅延、高セキュリティ、MEC(Multi-Access Edge Computing、ユーザーにより近い位置にサーバーやストレージを配備するシステム)を前提にしたクラウドサービス。全国にあるドコモのネットワーク設備内にクラウド基盤を構築し、画像認識APIなどの技術アセットも搭載、提供される。
日本一安定した5G網を持つ通信事業者が、ビジネスクラウドを提供する。そのビジネスクラウドの上で我々のSLAMソフトウェアを動かせたら、ロボットなどの自律走行を社会に実装するための大きな足がかりになるでしょう。
これは井島さん(スマロボ)の専門領域ですが、ロボットを普及させるためには、エッジ一台あたりのコストを下げなきゃいけないですよね。そういう意味でも、高度な計算処理に対応できる高スペック環境をクラウド側に構築することはとても重要なファクターです。
また、ロボットが自律移動する範囲が広がると、当然、作成する地図の容量も大きくなるので、エッジ側ではストレージやメモリ容量の限界で、全ての地図が保有できなくなります。ひとつの都市全体で……といったような広い範囲でロボットの自律移動を実現するには、クラウド化が必要不可欠となるわけです。
そのときに、5Gのレイテンシー(遅延)の低さや、大量接続という特長が生きてくるんです。
── テレワークロボットには、いずれ自己位置測定や自律移動の技術が入ってくるんでしょうか。
井島 はい。テレワークロボットも自律走行モデルのリリースを予定しています。
今、豊田さんや中村さんがお話しされた点については、私もまさにそうだなと思います。少し先の未来に、こういった技術や環境が実現することを楽しみにしています。
ただ一方で、「現在の世の中に、どれくらいこの話が通用するのだろう」というのが、いま私が感じている課題なんです。
「先端」と「裾野」のギャップを埋める
── 先端のインフラやテクノロジーをどう世の中に実装していくのか。それこそ、今日お集まりいただいた皆さんや、ドコモ5Gオープンパートナープログラムが取り組んでいることでもありますよね。
井島 そのとおりです。それを考えるときに、私はテクノロジーを提供する側とユーザーやマーケットのギャップが大きいんじゃないかと思うんです。
私はもともとコンテンツビジネスをやっていて、iモード立ち上げ期の1990年代末にコンテンツプロバイダが集められた場所にいました。当時プロデューサーだった松永真理さんがまずおっしゃったのは、「『インターネット』は禁句です。絶対に使わず、ほかの伝え方を考えてください」でした。
── ケータイでインターネットを使えるのが売りだったんじゃないんですか?
井島 当時はまだインターネットが先端技術で、広く普及していませんでした。「インターネット」という言葉を使った瞬間に、世間の大半の方々は耳を塞いでしまう。まさに、今の「5G」も同じ状況ではないかな、と。
私たちは子どもの頃に見たアニメで、人に寄り添って助けてくれる自律型ロボットのイメージを持っています。我々が作っている遠隔操作ロボットも、「なぜ自律にしないのか」「人手が足りないから自律で動いてくれないと困る」といった声は確かに聞かれるんです。
でも、そのセットアップやインテグレーション(統合)に何が必要なのかをイメージできるのはごく限られた人たちです。現時点でそのシステムを構築しようとすると、何百万、何千万円の見積もりが出る。そうなってやっと「そんなにコストがかかるの?」と気づいてもらえる段階ですから。
── そのコストを下げるためにも標準化できたほうがいいのでしょうが、その手前のギャップでつまずいている、と。
井島 我々もどうすればそのギャップを乗り越えられるかを考えています。ひとつは、「殺菌灯搭載ロボット」のように用途を限定してわかりやすく伝えること。殺菌灯は人体に有害な紫外線を発するので、取り扱いがセンシティブです。つまり、遠隔操作ロボットを導入する強いニーズがある。
そうやって具体的な用途が見えて初めて、まわりに人がいるときだけ停止するような簡単な自律走行でいいのか、それともSLAMのように人と共存して空気のような存在になるくらいの自律型エージェントを作るべきなのかを考え始められます。
最終的には自律型になっていくとしても、現実的なビジネスとしてどうソリューションに落としていくかが、この1〜2年は特に重要になると感じています。
「未来」と「現在」はどこでつながるのか
── 豊田さんや中村さんはあるべき未来から逆算していて、井島さんは今のアセットやニーズから積み重ねている。どちらも欠かせない視点だと思いますが、これって別々に考えていても、どこかでピタッとつながるんでしょうか。
中村 これは個人的な考えですが、僕はゆるやかな線形の変化の先にロボットの自律移動はないんじゃないかと思っています。どちらかというと、世の中があっと驚くような形で、突然、人間と自律型ロボットが暮らす世界が現れるんじゃないかと。
というのもやはり、自律型ロボットと人が共に暮らす社会からバックキャストしてハードウェア環境を作り込んでいかないと、実装するときの不都合を解消できないから。
たとえば、いまあるマンションやビルに自走するロボットを入れると、子どもたちと一緒にエレベーターに乗ることになってしまう。子どもからすると、勝手に動くロボットなんて、格好のオモチャです。よってたかってロボットにキックを食らわせる姿が想像できます。
── イメージが湧きました。ロボットが遊ばれている。そこで子どもがケガでもしたら大問題になります。
そこまでイメージすると、そもそも人とロボットが同じエレベーターに乗るべきか、という論点が出てくるでしょう。いまある建物を前提にすると、危ないからやめようという話になってしまう。ロボット用のエレベーターが先にないと、じゃあ導入してみようとはならないんです。
豊田 まさにそうなんですよね。都市や建築って一朝一夕にできるものではなくて、10年後、20年後をイメージしながら、さまざまなプレーヤーを巻き込んで整備していかないといけない。
将来のあるべき姿、統合された未来から空間記述の仕様やスケールを探り出し、どんなメタデータを組み込むかを決めておく。それによってさまざまなビジネスプレーヤーが参入する障壁が下がるし、結果としてみんながテクノロジーを使いやすい社会基盤が生まれます。
僕はそれを、コモングラウンド・リビングラボという実証実験空間でやっていて、ドコモは5Gのインフラやクラウドでやっている。こういった取り組みがどう相互につながって、多くのプレーヤーに参加してもらえるか。これが、次のイノベーションの成否を分けます。
ある程度の共通ルールができ、東京都内の主要施設には大体その仕様が採用されている。そんな状況になれば、そのマーケットに先行投資して技術開発を行いやすくなるでしょう。
── 皆さんがNTTドコモに期待することはなんですか。
井島 私はロボットを動かすソフトウェアとネットワークが融合する部分に期待しています。
今日のお話に出たようにテクノロジーの進化はハードとソフトの両輪で進みます。ソフトウェアの進化に合わせて、私たちもハードウェアをバージョンアップできるような仕組みや機能を持たせておかないといけない。
そうやってより短い時間軸でロボットを進化させていくには、dOICのようなプラットフォームが必要です。
それに、やはり我々のような技術を核とするベンチャーは営業力が弱いですから、NTTドコモの法人営業部隊に全国で顧客開拓をしていただけるのはとてもありがたい。
中村 社会実装されない技術には価値がないですからね。我々ソフトウェアを扱う側からすると、クラウドだけでなく、NTTドコモが持つハードウェアも魅力です。
ドコモのMRグラス(Mixed Reality=複合現実)「Magic Leap」 の基幹技術には、KudanのSLAMが採用されています。こんな形でベンチャーの技術が社会へ届き、デファクトスタンダードになる可能性もあります。
豊田 プラットフォーマー、サービサー、メーカー、それぞれの立場の人たちにお互いの動向が見えないと、誰も技術に投資できないという三すくみの状態になってしまう。まずは全員が、「いっせいのーせ!」で動き出さない限り、始まらないじゃないですか。
そのきっかけを作れる立場にNTTドコモはいるし、こういうオープンパートナーシッププログラムはまさにそのためにあるのでしょう。まずは一歩を踏み出して一緒に失敗してみようというリーダーシップを発揮されると、社会は意外とするっと変わるかもしれない。
私からこういった次世代技術にかかわる皆さんにお願いしたいのは、「どうか閉じないでください」ということです。オープンに行きましょう。



編集・執筆:宇野浩志
写真:後藤 渉
デザイン:Seisakujo
写真:後藤 渉
デザイン:Seisakujo
NTTドコモ | NewsPicks Brand Design

